
Der Passwortmanager KeePass2 kann neben vielen anderen Plattformen auf unter Ubuntu bzw. Debian genutzt werden.
Commits und Tags in Git signieren

Wer mit der Versionierungssoftware Git arbeitet und beispielsweise auf GitHub unterwegs ist, hat bestimmt schon mal das grüne Label Verified bei den Commits, oder auch Tags gesehen.

Damit wird angezeigt, dass der im Commit angegebene Autor auch wirklich derjenige ist, für den er sich ausgibt.
Theoretisch könnte man nämlich beliebigen Text in das Autor-Feld eines Commits rein schreiben.
Raspberry Pi 4 emulieren mit QEMU

Mancher kennt das vielleicht: Man möchte Software für einen Raspberry Pi testen, hat aber gerade keinen Raspi zur Hand, oder möchte nicht sein laufendes System gefährden.
Eine (relativ) einfache Lösung kann hier sein auf einem normalen Rechner eine Raspberry Pi zu emulieren.
Hierfür nutzen wir ein aktuelles Ubuntu-System (24.04) und die freie Virtualisierungssoftware QEMU.
Verbindungsprobleme mit USB 3.0 Festplatten/SSDs beheben

Viele USB 3.0 Festplatten oder SSDs werden inzwischen als USB Attached Storage (UAS) im System eingebunden. Dies führt jedoch bei manchen Geräten zu Problemen, wobei beispielsweise die Verbindung zum USB-Gerät mittendrin verloren geht und auch nicht automatisch wiederhergestellt wird. Manche Geräte werden im UAS-Modus auch erst gar nicht richtig erkannt.
In diesem Beitrag beschreibe ich eine mögliche Lösung das Problem.
Neue Webseite 2024

Nach vielen Jahren ist es nun so weit: Die cryCode.de Webseite hat von mir ein sehr umfangreiches Update bekommen. 🙂
Die neue Webseite basiert nun auf Hexo.
Das Theme habe ich stark angepasst und erweitert und dabei ein besonderes Augenmerk auf den Datenschutz gelegt. Sämtliche Inhalte der Seite werden von eigenen Servern, die in Deutschland stehen geladen und es werden keine externen Dienste direkt eingebunden.
CAN-Shield für Raspberry Pi und Arduino
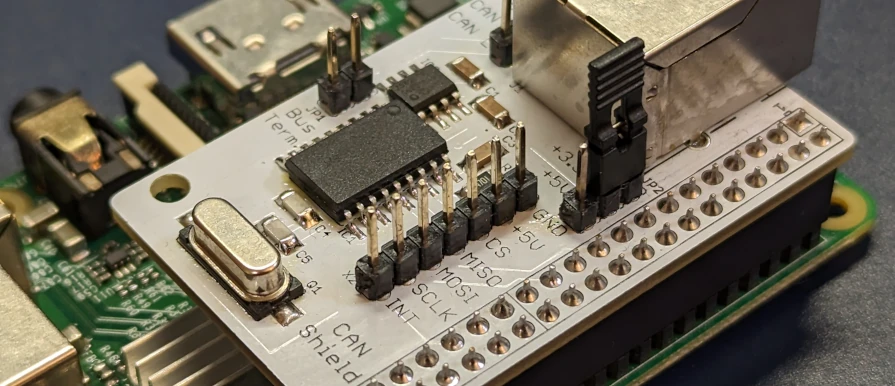
Das CAN-Shield ist eine von mir selbst entwickelte kleine Platine, über die sehr einfach eine CAN-Bus Anbindung an einen Raspberry Pi, Arduino oder andere Hardware erfolgen kann.
Serielle Schnittstelle über Ethernet
In diesem Beitrag beschreibe ich, wie man eine serielle Schnittstelle über Ethernet von einem Rechner auf einen anderen Rechner weiterleiten kann.
Damit ist es beispielsweise möglich eine serielle Schnittstelle von einem Raspberry Pi an den Server der eigenen Heimautomatisierung zu leiten, sodass der Server diese Schnittstelle nutzen kann, als wäre die Hardware direkt bei ihm selbst angeschlossen.
Ich habe damit beispielsweise bei mir die Schnittstelle meines als RadioHead Serial-Radio-Gateway fungierenden Arduinos an einem recht zentral im Haus platzierten Raspberry Pi an meinen HomePi übertragen, welcher dann die eigentliche Kommunikation übernimmt.
VS Code Server for WSL closed unexpectedly: Input/output error

Wer VS Code zusammen mit dem WSL Remote nutzt, kennt das Problem vielleicht:
Nach einem Herunterfahren des Computers und anschließenden wieder Hochfahren hat VS Code oftmals Probleme mit der Initialisierung des VS Code Server for WSL.
Als Fehlermeldung erscheint dann:
VS Code Server for WSL closed unexpectedly.
Check WSL terminal for more details.
Firefox - "befindet sich jetzt im Vollbildmodus" Meldung vollständig deaktivieren

Der Browser Firefox zeigt standardmäßig bei Webseiten, welche die Fullscreen-API verwenden (sich also selbst in den Vollbildmodus schalten können), immer eine Warnung an, dass die Seite sich im Vollbildmodus befindet.
Diese Warnung soll der Sicherheit des Nutzers dienen und beispielsweise unerwünschtes Phishing verhindern.
In einigen Fällen kann diese Warnung jedoch auch einfach nur lästig sein. Dies ist zum Beispiel der Fall, wenn wir eine Webseite permanent zu Informations- oder Steuerzwecken auf einem Touchdisplay anzeigen wollen.
SocketCAN über Ethernet mit Cannelloni
Unter Linux erfolgt die Anbindung von CAN-Bus Hardware meistens per SocketCAN über den Kernel. Dabei wird im System dann ein CAN-Interface bereitgestellt, zum Beispiel can0.
Mit der Software Cannelloni von Maximilian Güntner ist es möglich dieses CAN-Interface über eine Ethernetverbindung an einen anderen Linux-Rechner weiterzuleiten. Hierbei wird auf dem zweiten Rechner ein virtuelles CAN-Interface, zum Beispiel vcan0, erzeugt. Die CAN-Nachrichten werden dann mittels UDP zwischen beiden Systemen übertragen.